شبیه سازی ربات 6 درجه ازادی با استفاده از کنترلکننده فازی بهینه شده با الگوریتم ژنتیک

شبیه سازی ربات 6 درجه ازادی با استفاده از کنترلکننده فازی بهینه شده با الگوریتم ژنتیک
Alinateghi
شبیه سازی ربات 6 درجه ازادی با استفاده از کنترلکننده فازی بهینه شده با الگوریتم ژنتیک
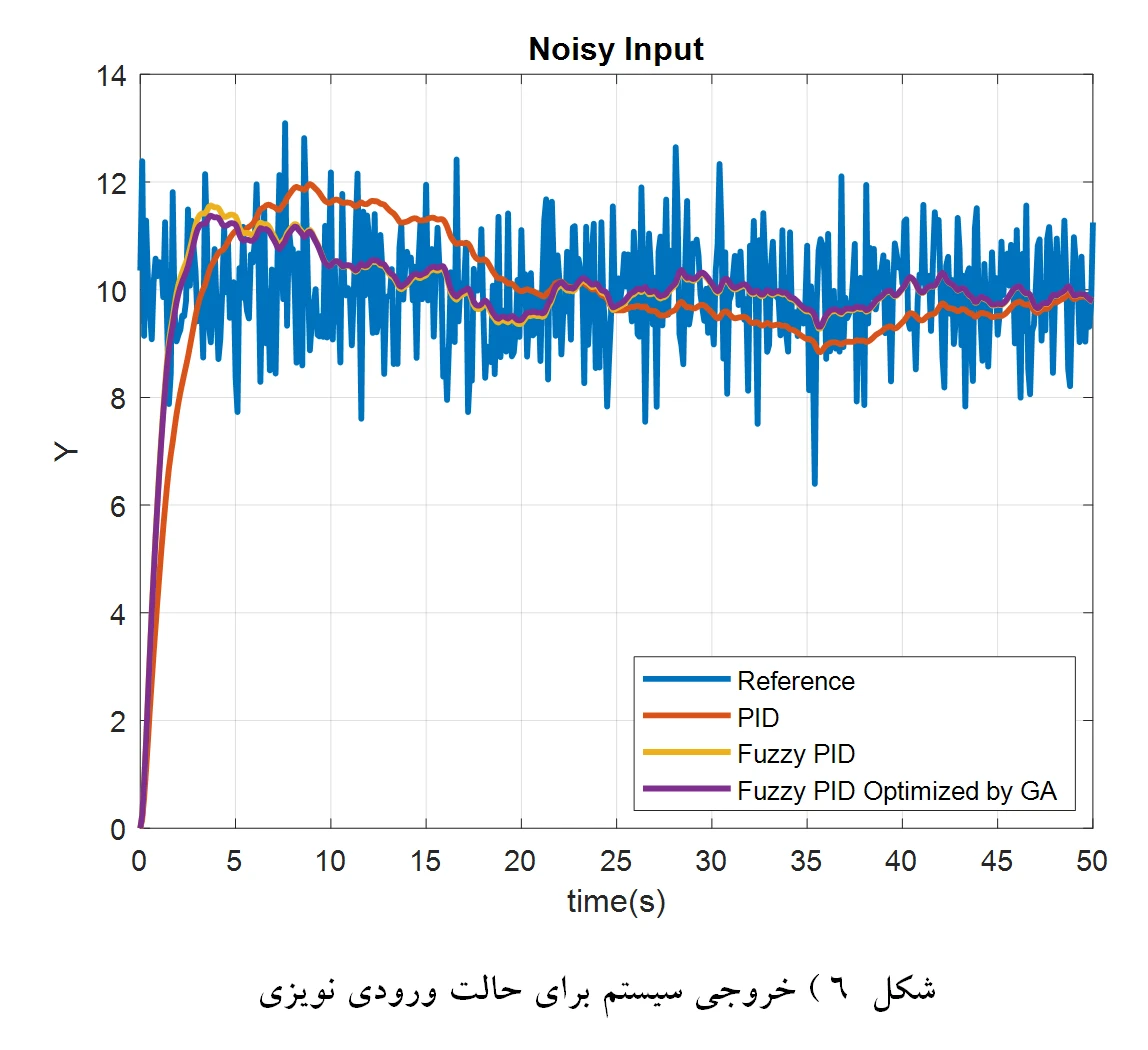
در این نتایج گزارش شبیه سازی یک ربات 6 درجه آزادی با استفاده از کنترلکننده PID با ضرایب ثابت، کنترلکننده فازی و کنترلکننده فازی بهینه شده با الگوریتم ژنتیک ارائه میشود.
22 بهمن 1404
مهارتهای استفاده شده
22 بهمن 1404


پروژهها

اجازه ارسال پوش نوتیفیکیشن
آیا میخواید از نوتیفیکیشن ها با خبر شوید؟