شبیهسازی سیستم کنترل حلقه بسته (Closed-loop) با کنترلکننده PID در MATLAB Simulink

شبیهسازی سیستم کنترل حلقه بسته (Closed-loop) با کنترلکننده PID در MATLAB Simulink
MHI2000
شبیهسازی سیستم کنترل حلقه بسته (Closed-loop) با کنترلکننده PID در MATLAB Simulink
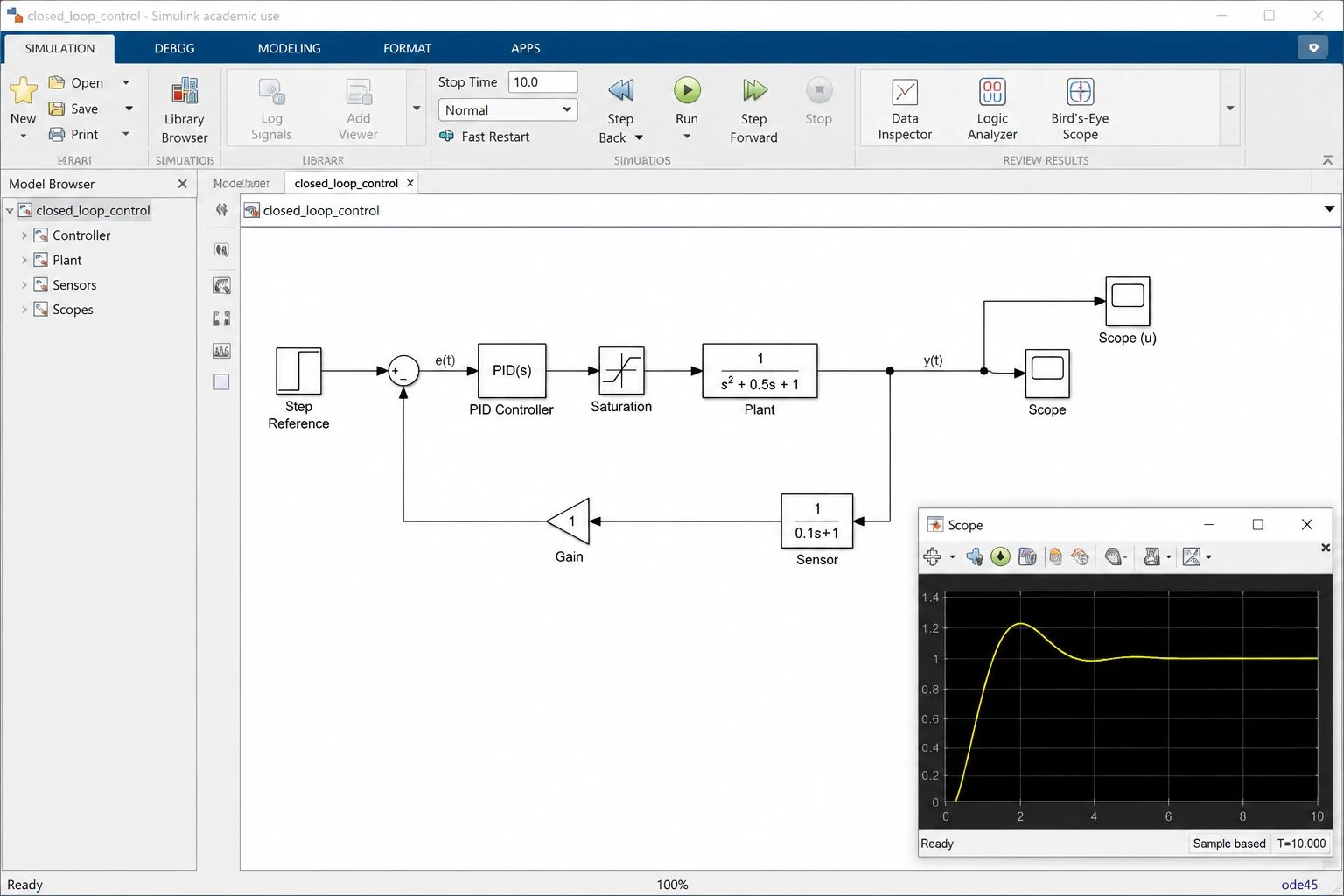
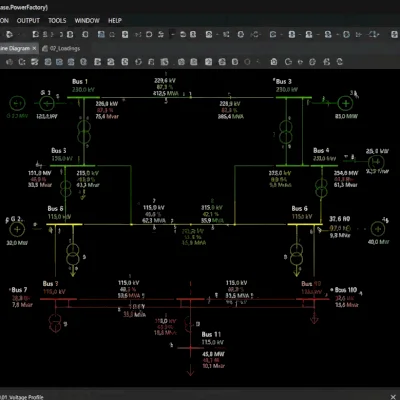
این تصویر نشاندهنده شبیهسازی یک سیستم کنترل فیدبکدار (حلقه بسته) در محیط سیمیولینک متلب است. در این مدل، یک ورودی پله (Step Reference) با سیگنال فیدبک مقایسه شده و خطای سیستم e(t)محاسبه میشود. این خطا وارد یک کنترلکننده PID میشود. پس از کنترلکننده، از یک بلوک اشباع (Saturation) برای اعمال محدودیتهای فیزیکی سیگنال کنترل استفاده شده است. پلنت (Plant) سیستم به صورت یک تابع تبدیل درجه دوم
1/(s^2+0.5s+1)
مدلسازی شده است. در مسیر فیدبک نیز، دینامیک سنسور به صورت یک سیستم درجه اول
1/(0.1s+1)
در نظر گرفته شده است. پنجره Scope خروجی سیستم (پاسخ پله) را نشان میدهد که پس از مقداری فراجهش (Overshoot) در زمان کوتاهی به پایداری رسیده و به خوبی ورودی مرجع را دنبال میکند.
24 خرداد 1405
مهارتهای استفاده شده
24 خرداد 1405



پروژهها

اجازه ارسال پوش نوتیفیکیشن
آیا میخواید از نوتیفیکیشن ها با خبر شوید؟