مدلسازی سینماتیکی و دینامیکی ربات 7 درجه آزادی

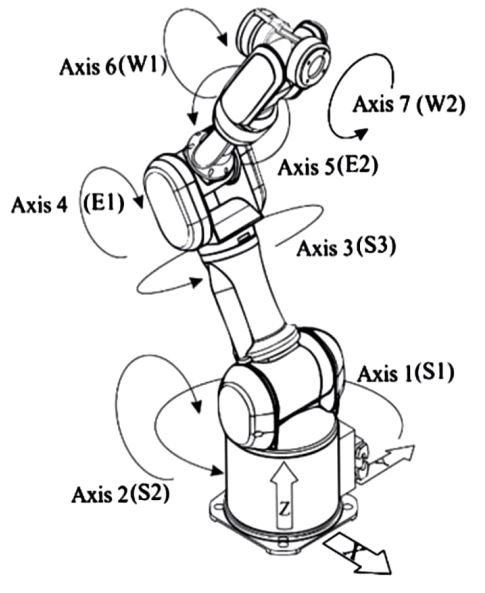
مدلسازی سینماتیکی و دینامیکی ربات 7 درجه آزادی
در این پروژه محاسبات مربوط به سینماتیک ربات، طراحی ترجکتوری،بدست آوردن پارامتر های سینماتیکی پس از اعمال ترجکتوری، استخراج معادلات دینامیکی به روش لاگرانژ، دینامیک مستقیم و دینامیک معکوس انجام شد و سپس در محیط کدنویسی متلب شبیه سازی شد.
11 دی 1401
مهارتهای استفاده شده
11 دی 1401


پروژهها

اجازه ارسال پوش نوتیفیکیشن
آیا میخواید از نوتیفیکیشن ها با خبر شوید؟