مدلسازی و شبیه سازی ربات 6 درجه آزادی ARMTIN10


مدلسازی و شبیه سازی ربات 6 درجه آزادی ARMTIN10
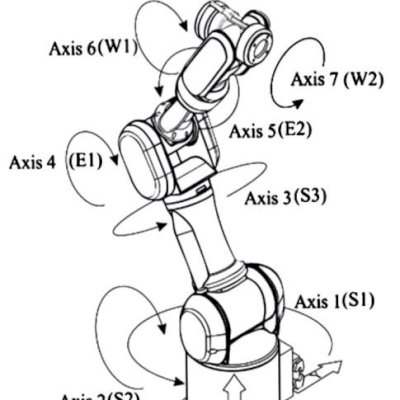
در این پروژه یک ربات 6 درجه آزادی در محیط سیمولینک مدلسازی و شبیه سازی شد.
قسمت های مختلف این پروژه عبارت بودند از:
Selecting The frames on robot
Extracting DH Parameters
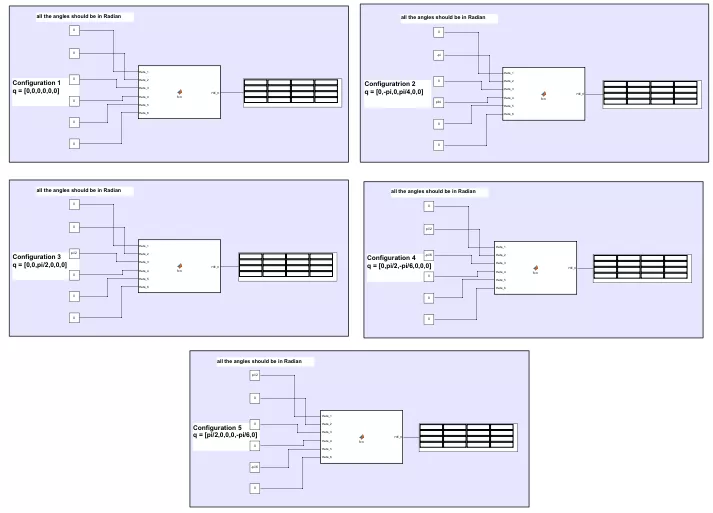
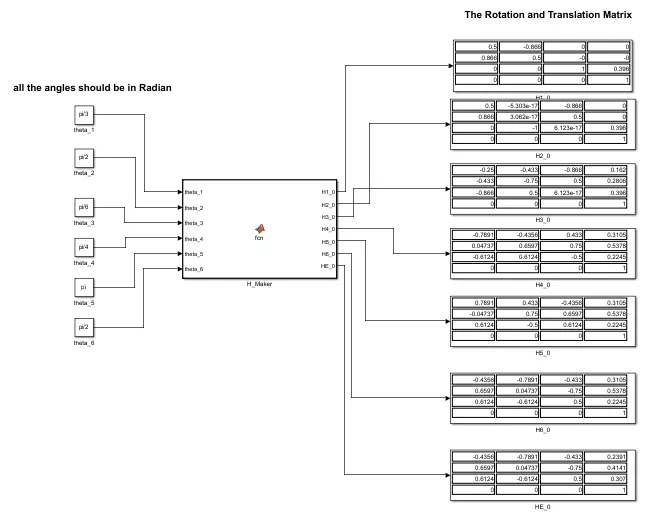
Forward Kinematics
Jacobian Matrix
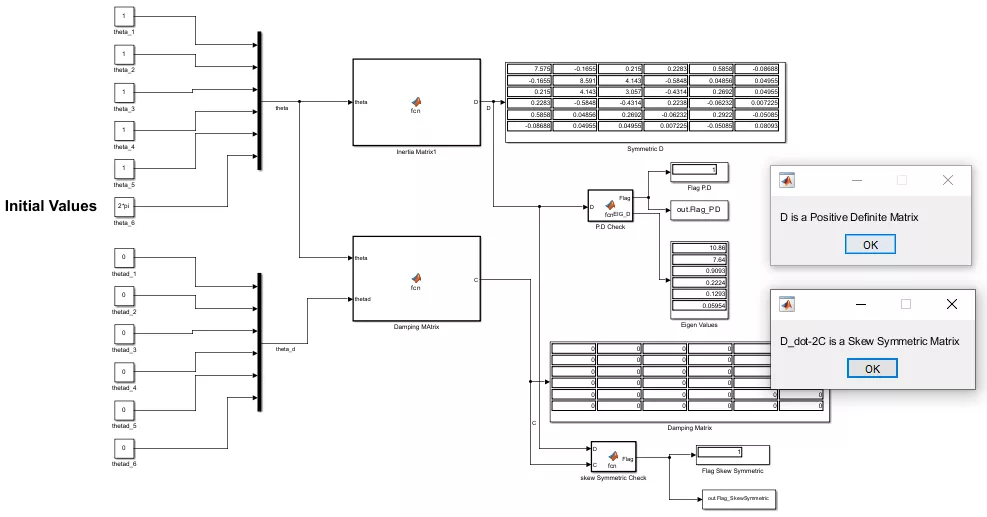
Calculating Dynamics
28 فروردین 1402
28 فروردین 1402

پروژهها

اجازه ارسال پوش نوتیفیکیشن
آیا میخواید از نوتیفیکیشن ها با خبر شوید؟