
پروژه ربات تعادل یاب
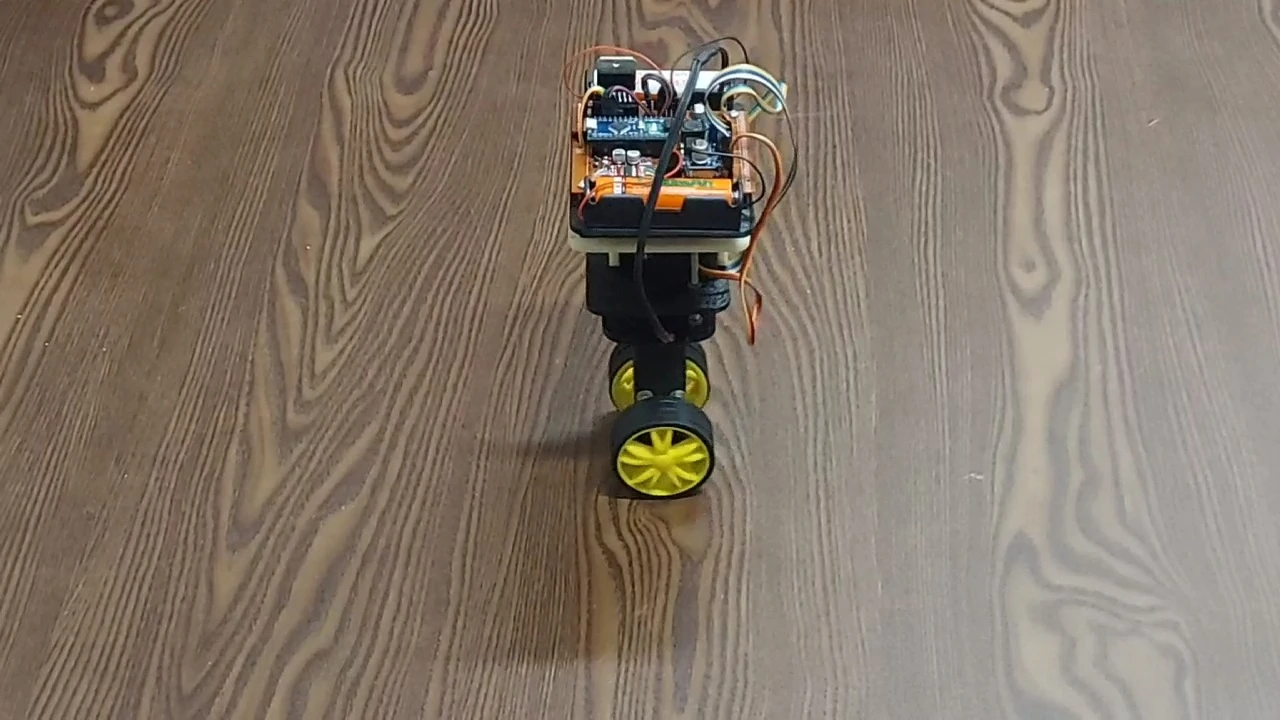
طراحی و ساخت ربات تعادلیاب دوچرخ با استفاده از سنسور MPU6050 و برد Arduino Nano.
در این پروژه با استفاده از فیلتر کالمن و الگوریتم PID، ربات قادر است بهصورت پایدار تعادل خود را حفظ کرده و در برابر نیروهای خارجی واکنش مناسب نشان دهد.
15 تیر 1404
مهارتهای استفاده شده
15 تیر 1404

پروژهها

اجازه ارسال پوش نوتیفیکیشن
آیا میخواید از نوتیفیکیشن ها با خبر شوید؟