
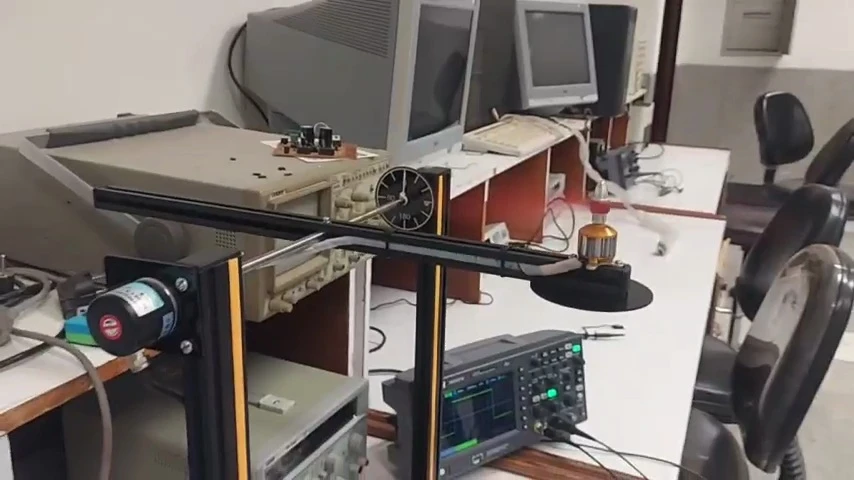
پاندل هوایی
طراحی و پیادهسازی پاندول هوایی (AeroPendulum) با استفاده از برد Arduino، موتور براشلس، ملخ و انکودر نوری.
در این پروژه با کنترل سرعت موتور براشلس از طریق درایور مناسب، نیروی رانش موردنیاز برای تنظیم موقعیت پاندول تأمین میشود. زاویه پاندول با انکودر اندازهگیری شده و با استفاده از الگوریتم PID کنترل میشود تا پاندول در موقعیت دلخواه پایدار بماند.
15 تیر 1404
مهارتهای استفاده شده
15 تیر 1404
پروژهها

اجازه ارسال پوش نوتیفیکیشن
آیا میخواید از نوتیفیکیشن ها با خبر شوید؟